Info Sekolah
Jumat, 03 Mei 2024
- Selamat Datang di Website Resmi SD IT Nurul Iman Purwantoro
- Selamat Datang di Website Resmi SD IT Nurul Iman Purwantoro
Robotika
Terbit : Minggu, 26 Januari 2020 - Kategori : Nurimpedia
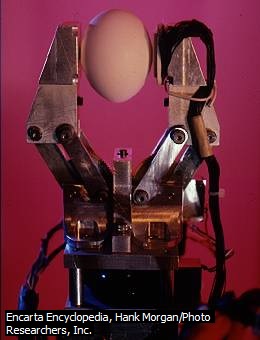
Tangan robot ini mampu melakukan tugas yang sulit mengambil dan memegang telur tanpa memecahkannya. Sebuah sensor susunan taktil yang terletak di sebelah kanan mekanisme mencengkeramnya mengirimkan informasi ke komputer kendali robot tentang tekanan yang diberikan oleh tangan robot; diberikan informasi ini, komputer kontrol memerintahkan tangan robot untuk melonggarkan, mengencangkan, atau mempertahankan kekuatan mencengkeram saat ini. Putaran umpan balik ini berulang terus-menerus, memungkinkan tangan robot untuk tetap berada di antara dua ujung menjatuhkan dan menghancurkan telur.
Artikel Lainnya



Artikel ini memiliki
0 Komentar
Pos Terbaru

2 bulanyang lalu
5 bulanyang lalu
5 bulanyang lalu

Tinggalkan Komentar